近日,智能制造与材料学院曲祥旭博士在国际期刊《Scientific Reports》发表题为“A compact variable stiffness joint for compliant robotics enabled by torsion-spring mean-diameter variation”的研究论文。
随着机器人逐步应用于康复训练、人机协作及复杂非结构化环境,机器人关节不仅需要具备较高的运动精度和承载能力,还需要兼顾柔顺性、环境适应性与人机交互安全。传统刚性关节在与人体或外部环境发生接触时,容易产生较大的冲击力;现有变刚度关节则普遍存在结构复杂、体积较大、传动环节较多以及刚度调节范围受限等问题。
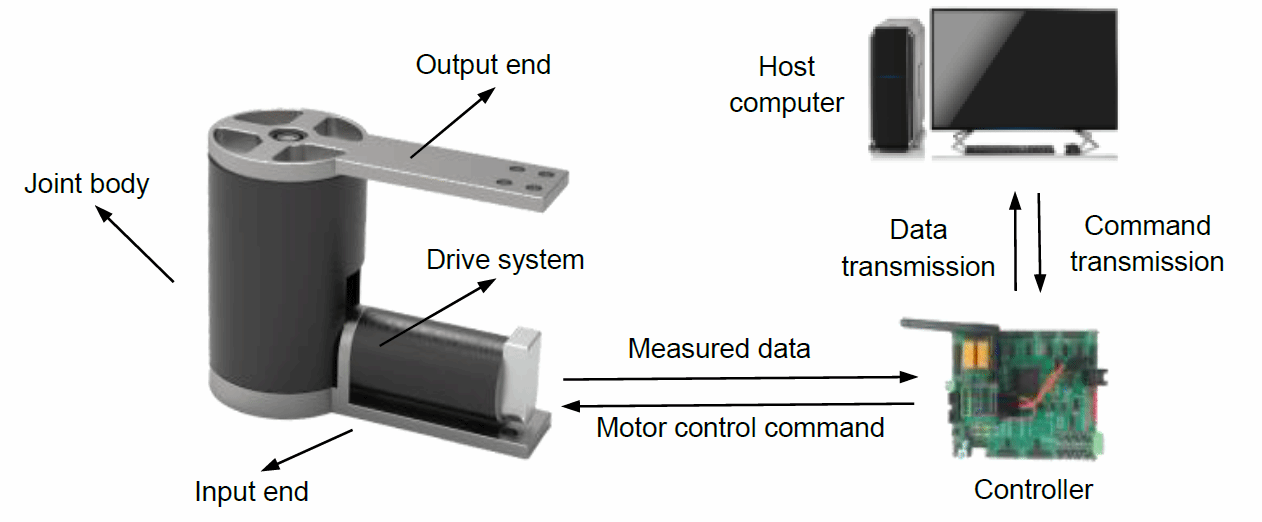
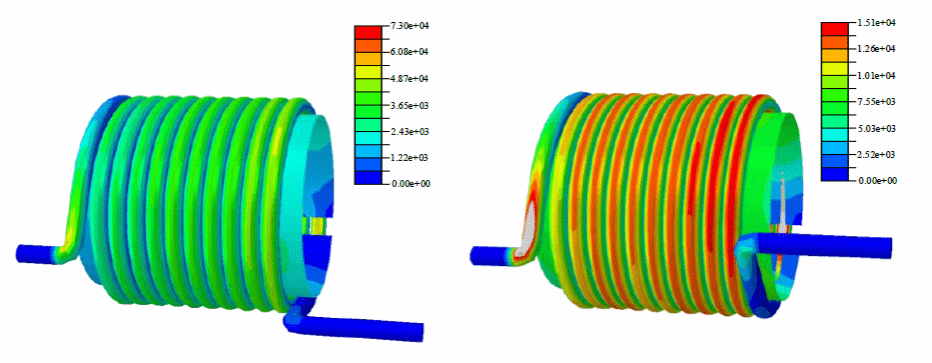
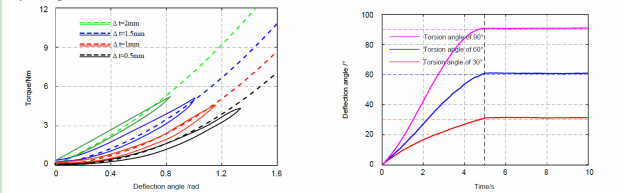
针对上述问题,研究团队从圆柱扭簧自身的几何变形特性出发,提出了一种基于扭簧平均圈径变化的紧凑型变刚度关节设计方法。研究发现,圆柱扭簧在发生扭转变形时,其平均圈径会随偏转角度增大而逐渐减小。团队利用这一变化规律,在扭簧内部设置开槽套筒、滚珠、滚珠导向套和双向螺纹调节机构,通过约束扭簧内径的收缩过程,改变关节的输出转矩和等效刚度。
该研究改变了将弹性元件视为固定参数储能部件的传统设计思路,从扭簧自身几何参数随变形变化的物理特性出发,为机器人变刚度关节设计提供了新的技术路径。相关成果可应用于康复机器人、协作机器人、人机交互装备及其他需要柔顺驱动和安全接触的机器人系统,对提升机器人在复杂环境中的适应能力和人机交互安全性具有积极意义。
论文信息:Xiangxu Qu, Zhengkai Feng, Kang Ju, Cui Liu, Lan Chen, Ruiqi Xu, Yuanbo Yang, Gang Wang, Yuting Zhang, Jingjie Dai. A compact variable stiffness joint for compliant robotics enabled by torsion-spring mean-diameter variation[J]. Scientific Reports, 2026. DOI: 10.1038/s41598-026-50967-4.