近日,智能制造与材料学院杨远博老师在《IEEE Access》《Scientific Reports》先后发表两篇高水平论文,围绕上肢康复机器人人机交互技术完成综述梳理与算法创新。
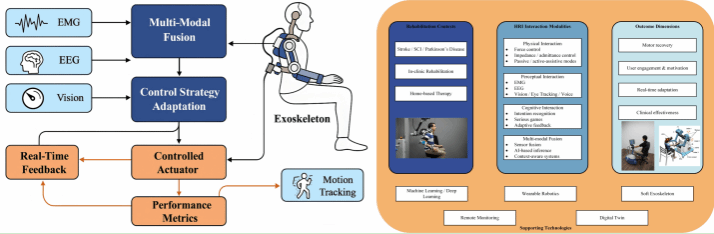
在人口老龄化背景下,上肢康复外骨骼需求持续增长,但现有设备存在交互智能化不足、肌电识别需反复校准、泛化性差等问题,限制临床与居家推广。团队先在《IEEE Access》刊发综述,从多维度系统梳理上肢康复机器人人机交互技术现状,剖析感知、控制、多模态融合等关键技术发展趋势,搭建领域完整理论研究框架。
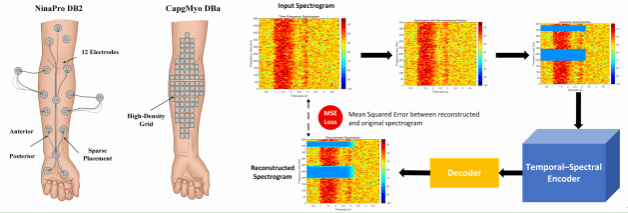
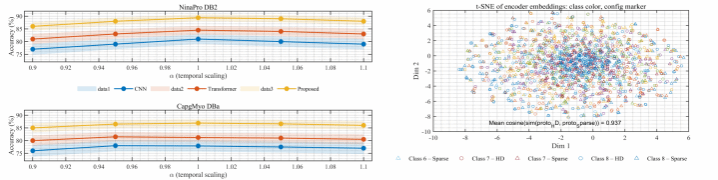
针对标定繁琐痛点,团队在《Scientific Reports》中提出融合自监督预训练与对抗域对齐的免校准肌电意图识别算法,消除受试者个体信号差异,无需重复标定即可识别运动意图。基于公开肌电数据集测试,该算法的识别精度、抗噪与跨场景泛化能力均优于传统模型,为康复装备“即戴即用”提供新方案。
该系列研究形成“综述梳理—算法创新”完整研究链条,成果可应用于上肢康复外骨骼、居家康复穿戴设备,助力提升康复机器人人机交互安全性与智能化水平。
论文信息:
(1) Yang Y, Teo H H, King Y J. Toward Intelligent Human–Robot Interaction for Upper Limb Rehabilitation: A Review of Emerging Modalities and Strategies. IEEE Access, 2025, 13: 185513–185532. DOI: 10.1109/ACCESS.2025.3625220
(2) Yang Y., Teo H. H., King Y. J., Zhang Y., Wang G., Qu X. Calibration-free sEMG intention recognition via self-supervised pretraining and adversarial domain alignment for upper-limb rehabilitation. Scientific Reports, 2025. DOI: 10.1038/s41598-025-28302-0